雷达场景模拟测试如何助力自动驾驶研发?
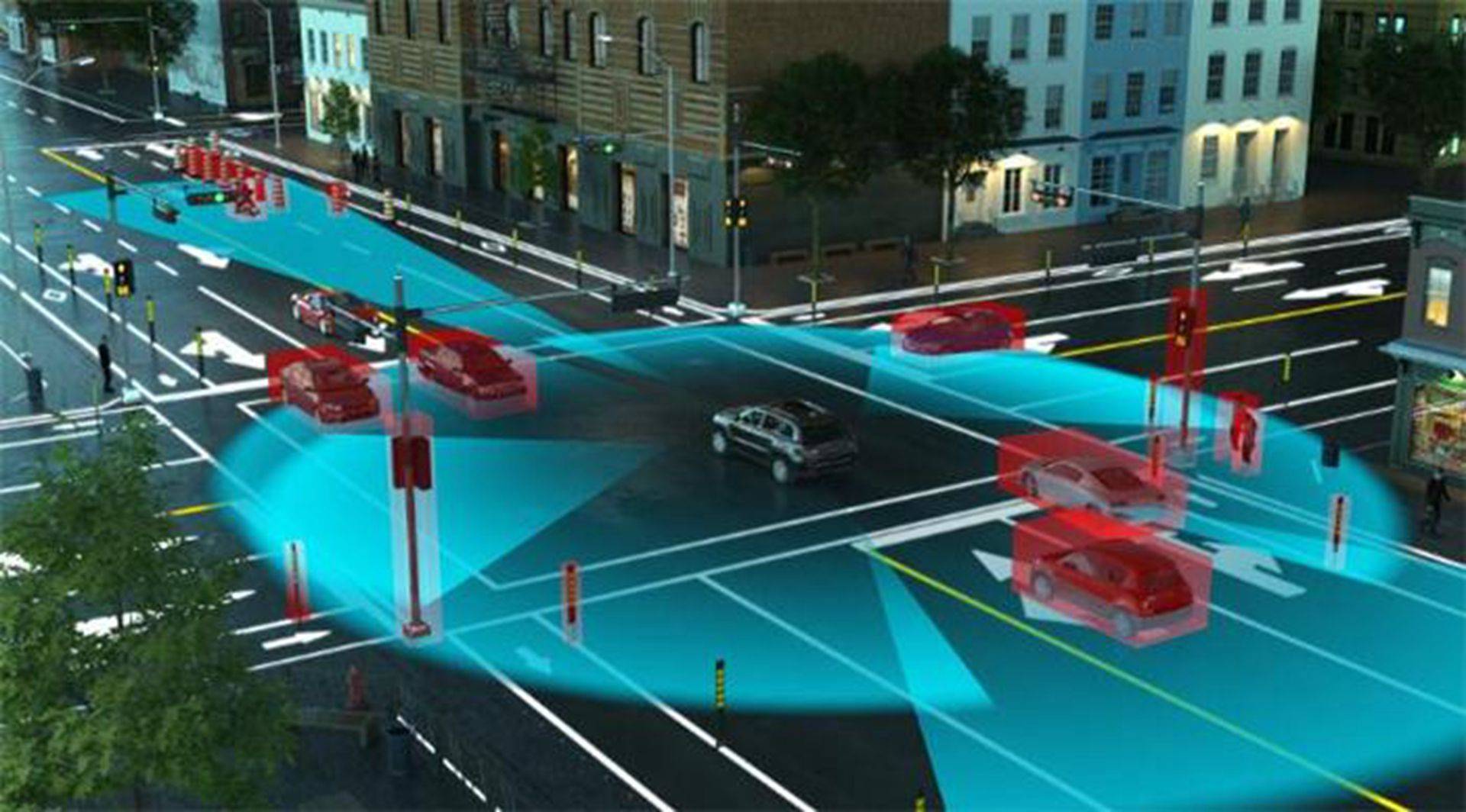
从L1、L2级驾驶辅助到L4、L5级自动驾驶,各种智能网联技术的发展推动了自动驾驶行业的进步。在这个过程中,模拟测试是新技术开发中不可缺少的环节。针对当前自动驾驶研发中对真实世界仿真场景测试的需求,是德科技推出了用于雷达传感器和算法开发的雷达场景模拟器。汽车制造商可以在实验室中测试复杂的现实世界场景,从而加速自动驾驶的发展。
是德科技雷达场景模拟器

传统测试方法的问题
任何自动驾驶一项新技术,在正式投放市场之前,都必须通过广泛的测试以验证其性能和可靠性。一般业界常用的测试方法有两种。首先,在软件模拟的基础上,在实验室进行场景模拟。二是通过实际路测获取真实数据。两种测试方法都有优点和缺点。前者,测试效率很高,但虚拟数据很难代表真实场景。在后一种情况下,测试场景是真实的,但测试效率和测试成本并不理想。尤其是一些涉及人身安全的特殊场景,如车辆过马路、逆行等,在实际路试中很难构建。
对此,是德科技汽车电子与能源事业部大中华区业务发展经理朱晓月认为:“无论是使用纯软件还是实车路试,都会有很多限制。理想的解决方案是添加更多实软件测试的要素,即把更多的实车场景搬进实验室进行测试,只要有合适的工具,能够足够准确地模拟实际道路场景。”
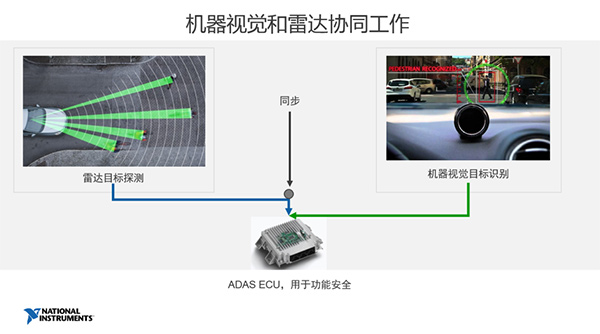
要将真实的路景搬进实验室进行模拟测试,难点在于如何让车辆看到的路景更真实。就传感器而言雷达实验室最新动态,就是让摄像头或雷达真实地检测到所有的目标信息,从而准确地传递给ECU,并通过算法做出执行判断。
目前的雷达传感器测试方案,一些使用多个雷达目标模拟器(RTS),每个RTS向雷达传感器呈现多个点目标并机械移动天线以模拟水平和垂直位置位置,这种机械自动化减慢了整体测试速度。还有一些解决方案采用仅包含几个 RTS 的天线墙,这意味着目标可以出现在场景中的任何位置,但不能同时出现。在静态或准静态环境下雷达实验室最新动态,该方法可以测试少数横向移动的目标,但受限于机械臂的速度。这些方案还具有有限的视野 (FOV),无法分辨距离小于 4 米的目标。在测试雷达传感器时,如果目标数量不够多,将无法反映完整的驾驶场景,无法重现真实环境中的复杂情况。
场景模拟测试的优势

是德科技此次发布的雷达场景模拟器结合了数百个微型射频(RF)前端,形成了一个可扩展的模拟屏幕。最多可呈现512个雷达目标,模拟距离短至1.5米,让客户可以在实验室模拟和测试复杂的真实驾驶场景。
从是德科技发布的信息来看,这款雷达场景模拟器具有三大优势。一是视野广阔。它可以帮助雷达传感器在更宽的连续视场 (FOV)(水平 +/-70°,垂直 +/-15°)内发现更多目标,还支持模拟近程和远程目标。可生成距离1.5-300米、时速0-400公里/小时的静态和动态目标,提供角分辨率小于1的多目标、多角度驾驶场景模拟学位。

其次,它可以测试复杂的真实环境。汽车制造商可以在实验室中设置各种环境条件变量、交通密度、速度、距离和目标总数,以真实模拟现实世界的驾驶场景。可以提前测试常见和极端情况,将风险降至最低。
三是加快算法的学习速度。它为在实验室中测试复杂场景提供了明确的真实环境,以前只能在路上进行。场景的早期测试将显着加快驾驶辅助和自动驾驶系统算法的学习速度,同时还可以摆脱手动测试或机械自动化造成的低效率。
“当然最后的路试还是需要的,但我们希望提前在实验室解决尽可能多的问题,然后在实车上进行性能验证,提高测试效率。”朱小月说。



